| 基于强化学习与遗传算法的机器人并行拆解序列规划方法 |
| |
| 作者姓名: | 汪开普 马晓艺 卢超 殷旅江 李新宇 |
| |
| 作者单位: | 武汉理工大学 机电工程学院, 湖北 武汉 430070;中国地质大学(武汉) 计算机学院, 湖北 武汉 430078;湖北汽车工业学院 经济管理学院, 湖北 十堰 442002;华中科技大学 机械科学与工程学院, 湖北 武汉 430074 |
| |
| 基金项目: | 国家自然科学基金资助项目(52305552);湖北省自然科学基金资助项目(2023AFB138);武汉市知识创新专项曙光计划资助项目(2023020201020322);中央高校基本科研业务费专项资金资助项目(WUT233104001);武汉理工大学自主创新研究基金资助项目(104972024KFYjc0040) |
| |
| 摘 要: | 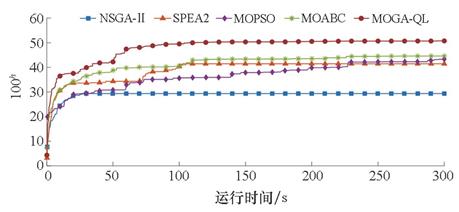
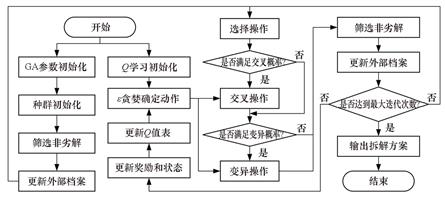
在拆解序列规划问题中,为了提高拆解效率、降低拆解能耗,引入了机器人并行拆解模式,构建了机器人并行拆解序列规划模型,并设计了基于强化学习的遗传算法。为了验证模型的正确性,构造了混合整数线性规划模型。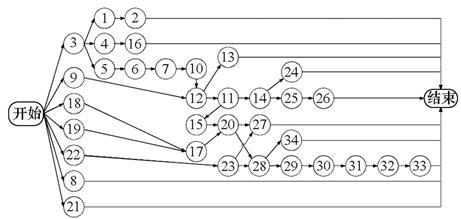
算法构造了基于目标导向的编解码策略,以提高初始解的质量;采用Q学习来选择算法迭代过程中的最佳交叉策略和变异策略,以增强算法的自适应能力。在一个34项任务的发动机拆解案例中,通过与四种经典多目标算法对比,验证了所提算法的优越性;分析所得拆解方案,结果表明机器人并行拆解模式可以有效缩短完工时间,并降低拆解能耗。
|
| 关 键 词: | 拆解序列规划 机器人并行拆解 混合整数线性规划模型 遗传算法 强化学习 |
| 收稿时间: | 2024-01-31 |
|
| 点击此处可从《国防科技大学学报》浏览原始摘要信息 |
|
点击此处可从《国防科技大学学报》下载免费的PDF全文 |
|