|
|||||
|
|
| 卫星单目位姿估计的关键点检测与不确定度同步预测 | |
| 作者姓名: | 苏昂 王梓 王靖皓 李璋 |
| 作者单位: | 国防科技大学 空天科学学院, 湖南 长沙 410073 ;图像测量与视觉导航湖南省重点实验室, 湖南 长沙 410073 |
| 基金项目: | 国家自然科学基金资助项目(12302252) |
| 摘 要: |  卫星单目视觉位姿估计通常先提取卫星图像关键特征点,再求解n点透视(perspective-n-points, PnP)问题得到摄像机与卫星之间的相对位姿关系,其中卫星关键点检测的精度是决定单目位姿估计精度的关键。针对该问题提出一种卫星关键点高精度检测方法,该算法在预测关键点图像坐标的同时给出关键点坐标预测的不确定度,在此基础上构建加权的PnP约束方程求解相对位置和姿态,显著提升了卫星单目位姿估计精度。 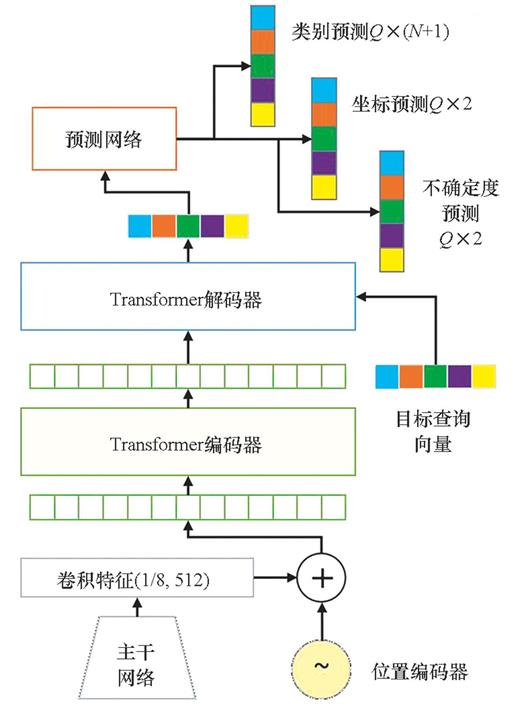 在公开的卫星单目位姿估计SPEED数据集上开展了相关实验,实验结果表明提出的同步预测关键点坐标与不确定度的卫星关键点检测方法能够有效提升关键点检测精度,并且通过求解加权的单目位姿估计问题显著提升了卫星单目位姿估计精度。  |
| 关 键 词: | 关键点检测 不确定度预测 Transformer 单目视觉 卫星位姿估计 |
| 收稿时间: | 2024-01-10 |
| 点击此处可从《国防科技大学学报》浏览原始摘要信息 | |
| 点击此处可从《国防科技大学学报》下载免费的PDF全文 | |