|
|||||
|
|
| 无人机基站三维空间位置部署方法设计与验证 | |
| 作者姓名: | 李朋 曹江 平洋 梁东晨 |
| 作者单位: | 军事科学院 战争研究院, 北京 100091 |
| 基金项目: | 国家自然科学基金资助项目(62222121) |
| 摘 要: | 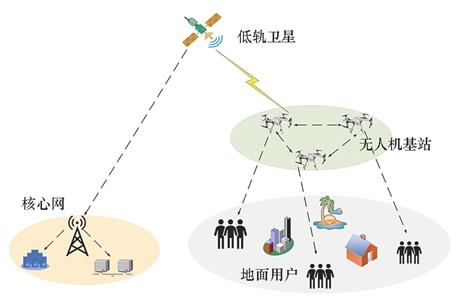 针对无人机基站三维空间部署动态性强、时效性高、约束因素多、耦合性强等特点导致的计算量大、仿真周期长等问题,提出利用高效全局优化(efficient global optimization, EGO)算法来确定无人机基站三维空间部署位置。考虑到EGO算法主要通过最优化改善期望(expectation improvement, EI)函数来获取新的采样点,提出利用改进的差分进化(differential evolution, DE)算法来优化EI函数,改进DE算法通过引入亲本选择框架、后代种群生成策略自适应选择框架来提高寻优能力及收敛速度。  利用3个典型的工程问题对改进EGO算法的性能进行测试,结果表明改进后的EGO算法在寻优能力、寻优速度以及稳定性方面都有明显提升。在此基础上,给出了利用改进EGO算法进行无人机基站三维空间部署的应用示例。  |
| 关 键 词: | 无人机基站 位置部署 高效全局优化算法 |
| 收稿时间: | 2022-11-04 |
| 点击此处可从《国防科技大学学报》浏览原始摘要信息 | |
| 点击此处可从《国防科技大学学报》下载全文 | |