|
|||||
|
|
| 智能搜救机器人在障碍地形的自主构型规划* | |
| 作者姓名: | 陈柏良 黄开宏 潘海南 肖军浩 吴文启 卢惠民 |
| 作者单位: | 国防科技大学智能科学学院,湖南长沙 410073 |
| 基金项目: | 国家自然科学基金资助项目(61872379) |
| 摘 要: |  为了解决带有辅助摆臂的智能搜救机器人自动规划构型以实现自主越障的难题,提出一种能够适应复杂地面形状的搜救机器人越障构型规划新方法,其核心是一种高适应性、高效率的机器人姿态预测算法.通过将地形表示为离散的点集,建立了搜救机器人的单侧姿态预测数学模型;进一步提出了快速求解该问题的算法,每秒可预测1 000~1 500个姿态. 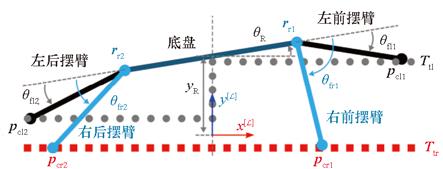 基于此,设计了机器人越障过程中状态、动作的评价指标,运用动态规划算法与滚动优化思想构建了具有优化能力的、能够实时运行的构型规划器.仿真与实物实验的结果表明,该方法能够使机器人自主调整构型穿越复杂地形,且相较强化学习算法和人工操作具有更平稳的越障效果. 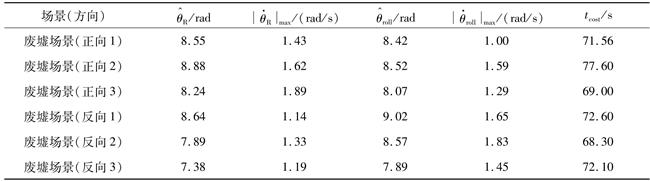 |
| 关 键 词: | 搜救机器人 障碍地形 姿态预测 动作规划 |
| 收稿时间: | 2022-02-19 |
| 本文献已被 万方数据 等数据库收录! | |
| 点击此处可从《国防科技大学学报》浏览原始摘要信息 | |
| 点击此处可从《国防科技大学学报》下载免费的PDF全文 | |